- 头条基于新型滑模观测器的永磁同步电机无传感器矢量控制系统导语北京交通大学电气工程学院的研究人员张立伟、李行、宋佩佩、张鹏、云蓝斯,在2019年《电工技术学报》增刊1上撰文指出,现代永磁同步电机矢量控制系统中多采用机械式速度传感器检测转子位置和转速信息,因电机内部工作环境复杂恶劣,机械式速度传感器无法保证系统稳定性,因此逐渐采用无速度传感器进行控制。在众多无速度传感器控制中,滑模观测器因具有对参数变化不敏感、鲁棒性强而得到广泛应用。 基于sigmoid函数的传统滑模观测器控制系统因高频信号切换导致系统存在较大抖振,针对这一问题,该文提出一种新型滑模观测器,该观测器采用分段指数型函数代替传统滑模观测器中的开关函数。并利用Lyapunov稳定判据对系统稳定性进行分析。最后对所提出的新型滑模观测器进行仿真分析和实验验证,结果表明,相比于传统滑模观测器,所提出的新型滑模观测器性能更好,稳定性更强。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因具有功率密度高、调速性能好等优点而得到广泛应用。PMSM矢量控制中,一般需要在转轴处安装速度传感器,实时反馈电机转子的位置和速度,实现整个控制系统闭环运行。然而速度传感器多为机械式结构,工作环境恶劣,易损坏,导致控制系统稳定性出现问题。为了解决这一类问题,国内外学者在无速度传感器控制领域做了大量研究。
国内外学者主要采用扩展卡尔曼滤波器法、模型参考自适应法以及滑模观测器法(Sliding Mode Observer, SMO)对无速度传感器控制系统进行研究。其中,滑模观测器受电机本身参数影响,具有较强的鲁棒性,相比较其他两种方法,该方法在无速度传感器控制系统中具有更显著的优势。
滑模观测器的本质是状态重构,即重新构造系统的状态,利用原系统可以直接测得的数据作为输入量,经过计算,使估算输出值接近于原系统的实际输出值。在PMSM矢量控制中,滑模观测器的实质是在观测转速和转子所在位置时利用开关信号不断变换系统结构,以很高的频率正负切换,快速地修正反电动势的值,使估算电流等于电机实际电流。由于PMSM的反电动势中包含转子位置和转速信息,从而可以利用观测器获取的反电动势信号得到转子位置和转速信息。
然而,滑模观测器因其固有的不连续开关特性,加上电机引入额外电压和电流噪声信号,引起系统抖振。目前,削弱滑模观测器抖振的方法是主流的研究方向。
- 有学者利用饱和函数代替传统滑模观测器中的开关函数,使系统在饱和层外呈开关函数变化,在饱和层内线性变化,该方法能够使得滑模观测器运行在更低速场合。
- 有学者提出在传统滑模观测器的基础上再加一阶滤波器,实现二阶滤波,实验证明该方法能够使系统更好地应对负载扰动和参数动态变化。
- 有学者提出了全局终端滑模型饱和函数的概念,使得系统可以在有限时间内得到收敛。
- 有学者提出了双曲正切函数代替开关函数的切换方法,实验证明该方法可以进一步降低抖振,提高转速的估算精度,但算法比较复杂,不利于实际应用。
- 有学者利用sigmoid函数代替开关函数,有效地削弱了传统滑模观测器中固有的抖振,并省去了滤波环节。
- 有学者提出了一种正弦型软开关滑模观测器,并通过对比四种不同的饱和函数证明了正弦型软开关滑模观测器更为精确。
- 有学者在设计滑模观测器时,除了利用电流量作为观测对象外,还引入速度和角度作为状态变量,使得系统更加稳定。
- 有学者提出了一种基于一阶滑模的工业电机传动领域的转子位置和转速估算方法,通过大量实验证明了一阶滑模的可应用性。
- 有学者提出了利用全局非线性分段函数重构滑模控制器的电流方程,可以优化控制系统性能。
- 有学者基于滑模变结构控制理论,将滑模观测器和滑模控制器结合到一个控制系统中,针对电机无法零速起动的问题,利用变频变压策略进行起动,起动成功后,采用时变滑模观测器进行切换控制,该方法解决了滑模变结构控制的低速起动问题。
- 有学者设计了一种三电平逆变电路对永磁同步电机进行驱动,基于硬件拓扑结构对电机模型进行改善,采用有限集模型预测控制策略,可以减小定子电流的谐波含量,改善系统的动态性能。
- 有学者结合非奇异终端滑模与线性滑模的优点,设计了一种新型的全局终端滑模观测器,该观测器在抖振抑制效果与估算精度以及提高收敛速度方面均有明显的改善。
- 有学者提出了一种以电流和磁链为估算目标的新型滑模观测器,通过对磁链估算值进行频谱分析,明显削弱了抖振,提高了系统的控制性能。
- 有学者利用转速开环、电流闭环与滑模观测器相结合的控制策略,低速时采用转速开环、电流闭环控制,实现电机平稳起动,中高速区域采用滑模观测器控制,期间利用正弦型切换函数实现两种控制方式的平稳无误差切换。
本文提出了一种新型滑模观测器,该观测器采用分段指数型函数代替传统滑模观测器中的开关函数,通过构建李雅普诺夫(Lyapunov)方程对所提出的新型滑模观测器进行了稳定判定。最后通过仿真分析和实验验证,证明了该新型滑模观测器在应对转矩突变和观测速度方面具有显著优势。
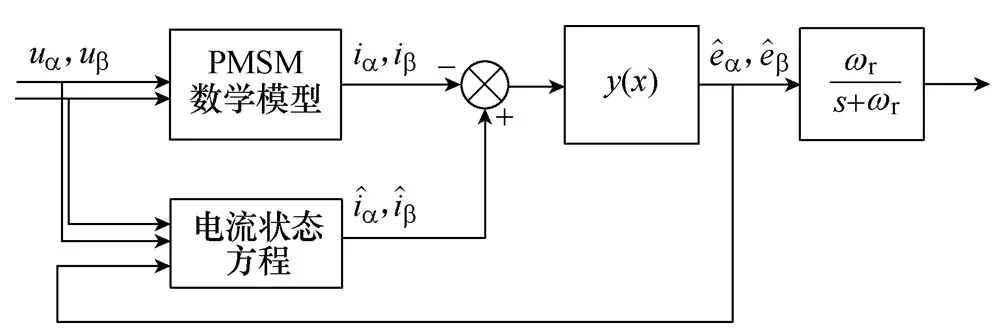
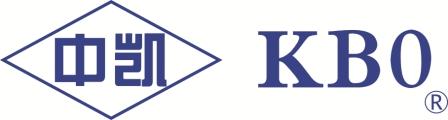
图4 新型滑模观测器结构框图
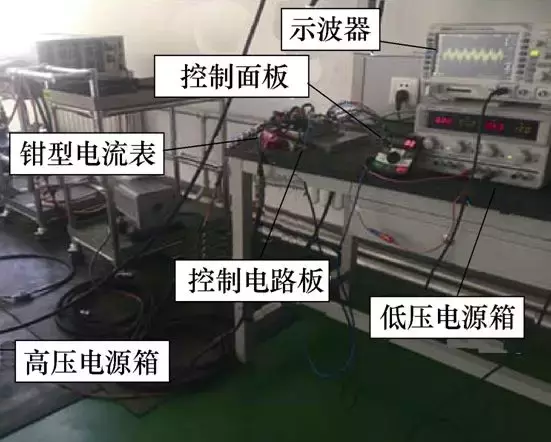
图15 实验平台
图16 永磁同步电机一体泵
图17 两次加载的负载值
总结
本文采用分段指数型函数代替传统滑模观测器中的开关函数,旨在削弱传统滑模观测器控制系统中因高频信号切换引起的系统抖振,通过Lyapunov稳定性判据对所提出的基于新型滑模观测器的控制系统进行了稳定判断,并提出了稳定条件,通过Matlab/Simulink仿真平台对该系统进行了仿真验证,经过与基于sigmoid函数的滑模观测器的控制系统仿真结果和实验结果进行对比,可以看出新型滑模观测器在抑制转矩脉动、维持三相电流稳定、转速估算以及应对负载突变的能力方面均具有显著优势。



电厂关键技术研究及其应用”专题征稿通知.jpg)