- 头条多相电机控制驱动技术研究综述导语清华大学电机工程与应用电子技术系、北京交通大学电气工程学院的研究人员刘自程、李永东、郑泽东,在2017年第24期《电工技术学报》上撰文指出,由于能够实现低压大功率、高可靠性、高控制灵活度等优点,多相电机在交流传动领域得到了越来越多的应用。 本文概述多相电机及其控制驱动技术的国内外发展历史,介绍矢量控制、直接转矩控制、模型预测控制三种典型的多相电机控制方法,对比解耦控制和最优电流控制两种容错控制策略,并归纳目前出现的多相逆变器的各种拓扑结构及其特点,进而对两种PWM调制策略的研究现状进行讨论,最后对当前的多相电机控制驱动技术进行了简要总结和展望。
清华大学电机工程与应用电子技术系、北京交通大学电气工程学院的研究人员刘自程、李永东、郑泽东,在2017年第24期《电工技术学报》上撰文指出,由于能够实现低压大功率、高可靠性、高控制灵活度等优点,多相电机在交流传动领域得到了越来越多的应用。
本文概述多相电机及其控制驱动技术的国内外发展历史,介绍矢量控制、直接转矩控制、模型预测控制三种典型的多相电机控制方法,对比解耦控制和最优电流控制两种容错控制策略,并归纳目前出现的多相逆变器的各种拓扑结构及其特点,进而对两种PWM调制策略的研究现状进行讨论,最后对当前的多相电机控制驱动技术进行了简要总结和展望。
由于长期以来传统三相供电制的确立和发展,在交流电气传动领域,三相电机及其调速驱动系统被广泛应用。在冶金轧钢、矿井提升、机车牵引、船舶推进等应用场合,对于调速传动功率的需求不断增大[1],通常采用的手段是提高电压、增大电流。然而,受到功率开关器件耐压及耐流值的限制,一般需要采用多电平技术[2,3]或者开关器件串、并联技术[4,5]来实现大功率的三相变频调速。
实现大功率传动的另外一种解决思路是增加电机的相数,降低对逆变器每相容量的要求。由于电力电子变频器的广泛应用,电机驱动完全可以不受三相供电系统限制,采用多相(相数多于三相)逆变器供电同样可以实现大功率交流传动。
与三相电机驱动系统相比,多相电机驱动系统具有以下的显著优点[6-10]:
(1)可以使用低功率等级器件实现低压大功率调速。同等功率的三相驱动系统若改装为多相系统,单相的供电电压会下降,特别适合于电力舰船推进系统、电力机车牵引系统等供电电压本身受限的大功率应用场合。
(2)转矩脉动频率增加且幅值减小。空间谐波磁动势是产生转矩脉动的直接原因,随着相数的增加,多相电机的基波电流产生的空间谐波磁动势的次数提高而幅值减小,从而使得转矩脉动得到优化,电机运行的效率也得到提高。
(3)具有较强的容错能力,可靠性提高。由于多相电机相数的冗余,当多相电机或者多相变频器的一相或者几相出现故障时,可以采用适当的控制策略,使得电机在断相的情况下降功率运行,而无需重新起动或停机。
(4)多相电机的控制资源更多,控制灵活度更高。电机的可控维数等于电机的独立相数;所以,多相电机比三相电机具有更多的控制自由度。利用这些自由度,可以实现更高的控制性能。比如对于整距绕组的多相电机,通过在相电流中注入一定的低次谐波,使得气隙磁场分布为平顶波,可以提高电机铁心的利用率和电机的功率密度。
1 国内外发展历史
早在20世纪60年代,E. E. Ward和H. Harer就对五相感应电机进行了理论分析和实验[11],发现随着相数增加,电机转矩脉动频率升高而幅值降低。1980年,T. M. Jahns提出通过增加电机及逆变器的相数[12],来实现提高交流传动的容错运行能力和可靠性。
但是,多相电机比起三相电机控制策略较为复杂,受到当时技术水平限制,控制方案难以实现,因而对多相电机及其驱动控制的研究进展比较缓慢。
20世纪90年代以来,由于电力电子技术、微控制器技术、现代电机控制理论的发展,以及船舶电力推进等应用场合对低压大功率和高可靠性电力传动的需求,国际上掀起了多相电机及驱动控制的研究热潮,出现了多种新颖的多相电机类型、变频器拓扑结构以及控制策略。
美国威斯康辛麦迪逊大学T. A. Lipo教授课题组对六相(双三相)感应电机矢量控制[13]和断相后的六相(双三相)电机解耦模型的建立和控制[14]进行了研究。美国德州A&M大学H. A. Toliyat教授课题组对采用集中绕组提高多相电机转矩密度[15],和通过相电流优化控制减小多相电机断相容错运行的转矩脉动[16]进行了大量的研究。
英国利物浦约翰莫尔斯大学E. Levi教授课题组则主要是对多相逆变器的PWM方法进行了深入研究[17],提出了具有提高电压利用率[18]、消除共模电压[19]等性能的脉宽调制方法。法国L2EP实验室的E. Semail教授课题组利用开绕组式的逆变器对多相电机的容错控制进行了有效的探索[20]。
美国伦斯勒理工大学的L. Parsa博士课题组针对多相永磁电机可能出现的多种断路和短路故障,提出了全局的容错控制方法[21]。西班牙学者F. Barrero和M. J. Duran率领的课题组重点研究了如何利用模型预测控制方法来实现多相感应电机的变频调速[22],以及实现断相、开关管失效[23]等故障下的容错运行。
国内对多相电机及其控制技术展开研究的主要科研单位有海军工程大学、华中科技大学、哈尔滨工业大学、中国科学院电工研究所、浙江大学、清华大学、中船重工712所等。
海军工程大学最早对十二相/三相双绕组交直流混合发电机的数学模型[24]、短路特性[25]等进行了深入研究,也对非正弦供电方式下十五相感应电机的稳态性能[26]、十五相电机对称断相下的参数变化等问题[27]进行了详细分析,近些年来提出了一种用于储能的双九相电机并研究了其数学模型和性能表现[28]。
华中科技大学则是最早实现了十五相感应电机的变频调速控制[29]。哈尔滨工业大学重点针对五相、六相永磁电机展开了研究,对电机本体设计[30]、谐波注入[31]与谐波抑制[32]、SVPWM[33]、断相容错控制[34]等问题进行了重点讨论。
中科院电工所主要对多相永磁电机进行研究,提出了多维度优化的控制方法[35,36]和断相容错控制方法[37]。浙江大学重点研究了多相电机的非正弦供电问题[38]和电机参数测量方法[39],并实现了九相感应电机的矢量控制[40]和直接转矩控制[41]。
清华大学集中研究了双三相感应电机的全调制范围的PWM策略[42]、在线参数辨识[43]、模型预测控制[44]等问题,也对十五相感应电机在船舶电力推进系统中的应用[45]进行了研究。中船重工712所研发了比较成熟的多相电机调速控制系统[46],在国内首次成功完成了10MW等级大功率船用多相电机电力推进系统的产品研制[47]。
2 多相电机的控制方法
多相电机的基本控制原理与三相电机相类似,不同点在于多相电机驱动系统的控制维度更高,需要同步控制各子空间的电流矢量,以保证定子各相电流的相位、幅值、谐波含量等满足一定的要求。
近几年来出现了很多的控制算法,主要可以分为矢量控制(Vector Control, VC)、直接转矩控制(Direct TorqueControl, DTC)、模型预测控制(Model Predictive Control, MPC)三大类。
2.1 矢量控制
在传统的三相电机矢量控制系统中,利用正交坐标变换,将自然坐标系下的物理量映射到同步旋转坐标系下,将定子相电流按励磁分量和转矩分量进行单独控制,从而实现矢量控制。多相系统与三相系统矢量控制的基本原理是非常相近的,但有两个不同点:坐标变换矩阵维数增加,逆变器控制的维度增加。
对于一个m相电机驱动系统,对其相电流在进行了m´m维的广义派克坐标变换后,可以得到m个解耦电流,如图1所示。
图1 m相电机的电流解耦变换
基波平面(d1q1)是最重要的机电能量转换平面,相应的基波平面电流id1、iq1分别作为励磁电流和转矩电流加以控制。其他的平面称为谐波平面,对于谐波平面上的电流一般有两种控制方式:
(1)谐波注入。对于集中绕组的多相电机,谐波平面也会发生机电能量转换,因此,可以通过特定比例的低次谐波注入来有效提高电机转矩密度[48],为了充分利用铁磁材料,一般以气隙磁通密度峰值最小为目标来确定谐波注入的比例[49]。但是,谐波注入的比例不仅要考虑不同工况下气隙磁通密度的优化,还要考虑轭部磁通密度的饱和等问题,否则谐波注入反而会降低转矩密度[38]。
(2)谐波抑制。由于机电能量的转换主要发生于基波平面,特别是对于分布式绕组的多相电机,谐波平面上的电流几乎不会参与机电能量转换,仅会产生谐波损耗。因此,在一些多相电机的应用场合,需要对谐波平面的电流加入闭环控制,抑制谐波电流[50]。另外,空间谐波的抑制还能够有效减少相电流间的不平衡度[51]。
2.2 直接转矩控制
在文献[52]中,H. A. Toliyat等将三相电机的直接转矩控制方法推广应用到五相电机中。由于两电平逆变器供电的五相电机系统可以产生多达32个电压空间矢量,根据磁链和转矩的暂态变化选择电压矢量时更加灵活,有助于提高转矩响应、减小定子磁链和转矩脉动等。
大多数已有的文献都是直接从三相电机的直接转矩控制扩展而来,即仅对基波平面的磁链矢量进行控制,很少考虑谐波平面的磁链控制问题。L. Parsa等通过综合使用基波平面和谐波平面的两个电压矢量查找表[53],实现了对五相永磁电机的两个平面中磁链矢量的控制,有效降低了相电流波形畸变,但基于查找表造成开关频率不固定的缺点仍然不适合大功率驱动的要求。
另外,直接转矩控制的一个重要的缺点是:电机相数越多,需要考虑的电压矢量和电压平面就越复杂,实现难度越大,目前的文献中还没有发现九相以上多相电机的直接转矩控制研究。因此,还需要进一步深入研究既能够方便扩展到任意多相,又能够协调控制多维空间下磁链矢量的直接转矩控制方法。
2.3 模型预测控制
模型预测控制自20世纪70年代末出现以后,逐渐被引入到电力电子及电机驱动控制中。虽然这种控制方法的计算量较大,但是比矢量控制具有更快的转矩响应,比直接转矩控制具有更多的控制灵活度。西班牙学者F. Barrero和M. J. Duran等对多相电机的模型预测控制进行了研究,其基本思路是将三相电机的模型预测方法推广到多相,如图2所示。
与三相系统的一个最重要的区别是,多相系统的目标函数中需要加入谐波电流抑制等相关指标。F. Barrero等在五相感应电机上的实验结果表明[22],与直接转矩控制相比,虽然模型预测控制的计算量会增长1.5倍,但是多目标的最优化可以有效降低平均开关频率,并且可以使电机的输出转矩更加平滑。
在近几年的研究中,H. Guzman等将模型预测控制引入矢量控制的电流环控制中,其控制框图如图3所示。在五相电机发生断相[54]、开关管失效[23]等故障时,识别故障部位并更新容错运行下可以产生的电压矢量表,将跟踪容错控制给出的各电流的指令值作为目标,进而选取最佳的电压矢量。
图2 多相电机的模型预测控制框图
图3 电流环模型预测控制
但是,对于一个n电平逆变器供电下的m相电机,其电压矢量有nm个,随着电机相数的增加,模型预测的计算量将呈指数增长,这严重限制了模型预测控制在多相电机驱动控制中的应用。目前仅在两电平逆变器供电下五相、六相的电机控制中能够见到模型预测控制的应用。
3 多相电机的容错运行
容错运行能力是多相电机比起三相电机的一个重大优势。在很多安全性要求较高的电机驱动应用场合,特别是在航空航天[55]和航海[56]中,电机及其驱动系统能否实现容错运行对于系统的安全至关重要。多相电机比传统电机具有更多的相数,在电机控制上具备了更多的自由度和更大的灵活性,可以在电机一相故障甚至多相故障时,仍能继续稳定运行。
电机驱动系统中可能出现的故障有很多种类,故障部位主要发生于变频器的开关管和电机的绕组。相对而言,变频器故障的概率比电机绕组故障的概率要大很多[55]。并且,电机驱动系统70%以上的故障会最终表现为断相故障或开关管失效故障[57],如图4所示。因此,国内外大多数关于容错运行的研究都考虑的是变频器的断相故障和开关管失效故障。
图4 断相故障与开关管失效故障示意图
变频器的一相或多相故障会直接导致电机的供电不对称,从而造成在电机的输出转矩上出现较大的转矩脉动。所以,容错控制的关键在于补偿电机气隙合成磁动势的不对称性,最终实现转矩脉动的抑制。
近些年来,国内外众多学者提出了多种多样的多相电机容错控制策略,大致可以分为断相解耦容错控制和最优电流容错控制两大类。
断相解耦容错控制最早由Y. Zhao等提出[14],其基本思想是,根据电机的故障断相情况,通过解耦变换和非对称旋转变换重新建立故障下电机的解耦数学模型,并分析故障下逆变器能够产生的各个电压矢量的作用效果,通过选择适合的电压矢量实现励磁电流和转矩电流的分别控制,最终实现多相电机的解耦容错控制。
H. Ryu及朱鹏等分别将此方法运用到了五相永磁电机[58]、五相整距绕组感应电 机[59]的断相容错控制中,并且都考虑到了谐波平面电流对转矩脉动的影响。王永兴等在将此方法推广到六相永磁电机的断相容错控制时,在电流控制中引入了铜损最小的优化目标,实现了良好的容错控制效果[36]。但是,故障下电机解耦模型的建立过程非常复杂,并且故障相位置的不同会直接导致解耦矩阵和数学模型的不同;所以,这种容错控制方法并没有被广泛推广使用。
最优电流容错控制最早由H. A. Toliyat等提出[60],其核心思想是,通过适当地控制变频器中剩余正常各相的电流,使得故障后电机中仍然能够产生规则的圆形气隙合成磁动势,从而获得平稳的电机输出转矩。同时,在确保圆形磁动势的前提下,可以对各相电流进一步的优化,优化的目标可以是电机的铜损最小[21,61],或者是各相电流的幅值均衡[62],或者是电机输出的电磁转矩最大[63]等。
实现最优电流控制的关键是电流环的控制,在容错控制的电流环中,应用较多的有以下几种:滞环控制[21,64],双向叠加的PI控制[63],比例谐振(PR)控制[65],以及模型预测控制(MPC)[54]。
最优电流容错控制不再着眼于故障下电机数学模型的精确解耦描述,而是重点关注如何在故障下实现电机电流和合成磁动势的控制。所以,最优电流容错控制比解耦容错控制具有更好的通用性,也得到了更加广泛的应用。
4 多相逆变器的拓扑结构
在多相电机驱动的研究热潮中,诞生了多种多相逆变器的拓扑结构。根据电源的形式,逆变器有电压源型逆变器(Voltage SourceInverter, VSI)和电流源型逆变器(Current Source Inverter, CSI)两种最基本的类型,本文所述的逆变器均为电压源型逆变器。
多相逆变器的拓扑结构种类繁多,图5对目前出现的各种拓扑结构进行了归纳和分类。从电能转换所经历的过程上,多相逆变器可以分为AC-DC- AC式(即整流-逆变式)和AC-AC式(即矩阵式)两个大类;其中对于AC-AC式,按照有无虚拟母线,可以分为直接式和间接式。
按照电机定子绕组有无中性点,可以分为单端式和开绕组式两个大类。对于开绕组式,按照独立直流电源的个数,可以分为单直流电源式和双直流电源式。对于单端式,按照中性点的个数,可以分为单中性点式和多中性点式。
图5 多相逆变器拓扑类型分类
4.1 AC-DC-AC式
在这种形式的逆变器中,三相电压源首先经过整流变为直流电,直流电再经过逆变成为多相交流电,其拓扑结构如图6所示。直流母线的存在使得输入侧与输出侧实现了解耦,便于对整流和逆变的控制。目前绝大多数的多相逆变器均采用这种拓扑结构。
图6 AC-DC-AC式多相逆变器拓扑结构
4.2 AC-AC式
AC-AC式又称为矩阵式,这种结构去掉了AC-DC-AC式逆变器中的直流母线,实现了直接由三相交流电到多相交流电的转换。按照有无虚拟母线,矩阵变换器又可以分为直接式[66]和间接式[67],分别如图7和图8所示。
多相矩阵式逆变器省去了电容构成的储能环节,逆变器的体积和重量都能降低;然而,所需要的开关器件的数量明显上升,同时控制和调制的复杂程度大大增加。矩阵式的多相逆变器目前仍处于研究阶段,尚未得到广泛的应用。
图7 直接式多相矩阵变换器拓扑结构
图8 间接式多相矩阵变换器拓扑结构
4.3 开绕组式
开绕组式指的是电机定子绕组的两端均与逆变器相连接,最典型的是H桥开绕组式拓扑结构,图9、图10所示分别为单、双直流电源开绕组式的多相逆变器。开绕组式的逆变器主要用于驱动定子相绕组间相互隔离的多相电机,适用于大功率电机驱动场合[68],特别是船舶电力推进系统[69]。
图9 单直流电源开绕组式多相逆变器拓扑结构
图10 双直流电源开绕组式多相逆变器拓扑结构
这种结构的逆变器具有很多优点:①提高了直流母线电压的利用率;②可以实现对每一相定子绕组上电压的独立控制,进而能够实现更为灵活的PWM方式;③在逆变器或电机定子的某相出现故障时,其他各相的相电压不会受到影响。
但是,开绕组式的拓扑要求每相至少需要一个H桥(4个开关器件),器件成本较高,不适合功率相对较小的系统中推广使用。
在单直流电源拓扑结构中,存在共模电流回路且阻抗较小,PWM产生的共模电压会导致较大共模电流的出现,从而会造成额外的电机损耗。学者们提出了很多改进的PWM方法以消除共模电压,从而消除共模电流;但是改进的PWM方法会降低直流母线电压的利用率[19,70],同时实现起来比较复杂而不容易扩展到任意多相[71,72]。
双直流电源拓扑结构需要两个隔离的直流电源,虽然硬件成本有所提高,但是不存在共模回路,也就避免了共模电流的产生。两个直流电源的电压可以不同,比如电压设置为2∶1,以产生四电平的调制效果[73]。
4.4 单端式
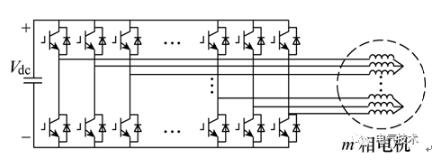
单端式指的是电机的定子绕组只有一端与逆变器相连接,因而存在定子绕组的中性点。如果只存在一个中性点,即所有定子绕组的一端连接在一起,称之为单中性点单端式,是目前应用最为广泛的多相逆变器拓扑结构,如图11所示。
如果每一组对称的定子相绕组都有独立的中性点,比如在六相电机中两组对称三相绕组各有一个中性点[74],称之为多中性点单端式,如图12所示。多中性点式拓扑具有模块化的特点,当某相出现故障后,仅会影响到共中性点的各相,其他非共中性点的各相不会受到影响;
然而这种拓扑的直流电压利用率及其电压矢量的种类和数量都要低于单中性点式,而且这种拓扑结构不适用于某些定子绕组相数为奇数、定子各相绕组对称分布的多相电机(如七相、十一相等电机)。
图11 单端单中性点式多相逆变器拓扑结构
图12 单端多中性点式多相逆变器拓扑结构
与开绕组式多相逆变器相比,单端式多相逆变器的相电压控制灵活度和容错能力都有所降低,并且中性点上存在的共模电压会通过产生轴承电流而损害电机轴承[75],同时也会带来共模干扰[76]等问题;但其拓扑结构以半桥作为各相的基本单元,结构简单、控制方便、成本低廉,广泛应用于几个千瓦到几百个千瓦的多相电机驱动系统中[77,78]。
5 多相逆变器的PWM
逆变器的PWM主要有两大类,即空间矢量PWM(Space VectorPWM, SVPWM)和载波PWM(Carrier-based PWM, CPWM)。
5.1 空间矢量PWM
对于多相逆变器,随着相数的增大,逆变器输出的空间电压矢量的数目成指数增加。以三电平来看,三相逆变器有27个电压矢量,五相逆变器有243个电压矢量,十五相逆变器则有14348907个电压矢量。电压矢量的选择和作用时间的计算变得非常复杂。
早期实现SVPWM方法的思路是将三相SVPWM简单推广到多相系统,选择幅值最大的电压矢量,即处于平面最外围的电压空间矢量(即最长的电压矢量),作为基本矢量[79,80],这种方法被称为最大幅值SVPWM。
例如,对于一个两电平五相逆变器,图13所示为32个电压矢量中30个非零矢量,最大幅值SVPWM只选取平面最外围的10个电压矢量,这样显然能够有效提高直流母线电压利用率。
但是,因为xy平面的电压处于完全不可控的状态,谐波平面的电压伏秒值不为零,因而相电流中会存在一定的谐波电流。随着相数的增大,最大幅值SVPWM的电压利用率会不断升高,其相电压输出波形会越来越接近于阶梯波[81]。
图13 电压矢量在平面和xy平面上的分布
针对谐波电流过大的问题,Y. Zhao等提出了一种矢量空间分解的多相SVPWM[13]。这种方法不再只选择基波平面幅值最大的矢量,而是通过选择多个电压矢量,使得在谐波平面的伏秒值为零,基波平面的伏秒值为参考值,从而实现了在实时控制转矩的同时,有效抑制了定子谐波电流。
但是,电压矢量的作用时间需要实时在线求解,使得该方法的实时运算量比较大;而且,在一个开关周期内有的桥臂上的开关器件会发生多次开关,增大了开关损耗。薛山等对这种调制方法进行了改进,以抑制谐波电压为目标,预先计算区间内最近的4个电压矢量的作用时间,并确定电压矢量作用顺序,实现了实时计算的简化和开关损耗的降低[82]。
高宏伟等在上述调制方法的基础上,进一步给出了直接计算各相调制函数的方法,避免了坐标变换和三角函数运算[83]。
E. Levi课题组的研究人员将多相SVPWM推广到了三电平五相及七相逆变器的应用中[19,84],但是电压矢量的分析、选取、作用时间计算会变得非常复杂。因此,他们指出,三电平多相逆变器中SVPWM调制比起载波PWM的工程实用性低[17]。
此外,H. Ryu等对如何通过SVPWM实现五相系统的非正弦供电进行了研究,有效提高了直流母线电压利用率[85]。刘东等进一步研究了在九相系统中如何协调基波平面与3个谐波平面,通过SVPWM实现特定谐波注入,以提高整距绕组九相电机的转矩密度[86]。
5.2 载波PWM
载波PWM是将某一相的调制波与该相的载波进行比较,从而产生该相的PWM。逆变器最终输出开关状态的组合取决于各相PWM的组合,相数m的增长并不会增加载波PWM的复杂度。因此,多相逆变器的载波PWM实现简单,可以很方便地推广到任意m相逆变器。
虽然载波PWM相比SVPWM存在直流母线电压利用率不高的问题,但是通过零序分量的注入,可以改善这一问题[87]。在文献[17]中,对三电平五相逆变器的SVPWM和载波PWM进行了详细的对比分析,得出的结论是:采用适当零序注入的载波PWM与SVPWM具有相同的直流母线电压利用率,以及相同的谐波抑制和共模电压抑制效果;同时,载波PWM计算量小、易于实现,更适合向任意多相系统推广使用。
载波PWM的调制波中,可以注入不同的零序电压。于飞等的研究指出[88],当零序注入为正弦参考电压极值的均值时,直流母线电压利用率会提高,谐波性能接近于空间矢量分解SVPWM;当零序注入为交替使用的正弦参考电压极大值和极小值时,能够有效减少开关管的开关次数,降低逆变器的开关损耗。
S. Karugaba等根据负载的不对称度来调整调制波中零序电压的注入,使得五相逆变器的各相输出电压也相应地产生不对称,最终实现了各相不对称负载上的供电电流保持对称[89]。
在多相多电平载波PWM中,改变同一相中各个三角载波的关系,可以实现不同的调制效果。N. Bodo等针对双直流电源开绕组式五相逆变器(见图10)的三电平载波PWM,研究了载波层叠PWM、载波反相PWM、载波移相PWM,发现载波层叠PWM的输出电压THD最小;同时,在一定的载波频率下,载波反相PWM和载波移相PWM的调制效果相当[90]。
D. Glose等发现[91],在由两个三相逆变器构成对称六相逆变器中,改变两个三相逆变器中三角载波之间的相位值将会导致电机的损耗发生变化,而且存在一个最佳相移角使得电机的损耗最小。Z. Liu等则提出了将两电平多相逆变器中各相的三角载波相位之间设置均衡移相,以有效减少逆变器输出的共模电压[92]。
此外,针对三相到九相的矩阵式变换器(见图7),S. M. Ahamed等提出了易于实现的载波PWM[66],保持了输入电流的正弦和输入侧的单位功率因数,但是由于AC-AC拓扑结构的限制,调制度最大只能达到76.2%。
6 结论
本文主要对多相电机及其控制驱动技术进行了梳理和归纳,可以进行如下的总结和展望:
1)随着驱动功率需求的提高,多相电机驱动系统的相数和电平数会逐步提高。然而,由于多相逆变器的电压矢量数目及开关状态组合的数目随相数和电平数的增大呈指数增长,基于电压矢量选择的直接转矩控制和模型预测控制的计算量将会很大,难以在实际工程的运算控制器中实现。
基于解耦变换并主要进行基波平面电流控制的矢量控制方法具有更高的通用性,其计算复杂度不会随着电机相数增加而大幅增加。因此,在未来的高相数多相电机的实际工业工程应用中,矢量控制将会更多被采用。
2)对于多相电机的容错运行,虽然最优电流容错控制比断相解耦容错控制对于电机精确数学模型的依赖性降低,但是依旧需要检测逆变器的具体故障位置与状态,给出相应的控制指令值,并进行故障前后控制策略的切换。在控制策略切换的过程中,逆变器极易对电机运行造成冲击,但是,目前尚缺乏对于正常与容错工况、不同容错工况之间进行控制策略切换的详细研究,导致容错控制策略还难以应用到实际的工程中。同时,有必要研究对数学模型和电机参数的依赖性低、在正常运行和各种故障工况都能有效抑制转矩脉动、方便于扩展到任意相数的多相电机通用容错控制方法。
3)多相逆变器拓扑结构类型丰富,在实际应用中,应当综合考虑驱动功率、电压利用率、硬件成本等因素,选择最适合的拓扑结构。在未来的研究中,在多电平多相逆变器、容错重构型多相逆变器、电动汽车充放电多相逆变器等应用领域,将会出现更多的、更加灵活的拓扑结构。
4)对于多相逆变器的PWM,载波PWM比空间矢量PWM更容易实现,调制的灵活度也更高:通过注入零序电压,可以提高母线电压利用率;通过改变各相载波之间的相位关系,可以实现减少电机损耗或抑制共模电压。
考虑到多相逆变器比传统三相逆变器具有更多的自由度,如何进一步利用多相载波PWM的自由度来提高调制性能(如降低共模电压)和优化逆变器设计(如减小母线电容)等问题,值得更多的探索。



电厂关键技术研究及其应用”专题征稿通知.jpg)